컨테이너 터미널 기술의 최신 시장 동향 (1)
작성자 : 원승환 군산대학교 국제물류학과 교수 2022.11.01 게시안벽크레인, 야드크레인, 이송 차량 기술 최신 시장 동향
안벽크레인 및 야드크레인
크레인 분야의 가장 큰 이슈는 자동화이며, 세 가지 발전 단계를 거친다. 첫 번째 단계는 크레인 상에서 이루어졌던 통제가 원격 통제로 전환되는 것이다. 작업자는 크레인에 탑승할 필요 없이, 편안한 사무실 환경에서 근무할 수 있다. 작업자는 크레인에 설치된 카메라가 여러 각도에서 실시간으로 포착하는 영상을 보면서 조이스틱으로 크레인을 조종할 수 있다. 두 번째 단계는 고급 컴퓨터 비전 및 제어 기술을 통해 일부 작업을 자동으로 실행하는 것이다. 컴퓨터 비전 기술을 사용하면 크레인이 작업 대상을 정확하게 볼 수 있으며, 제어 기술은 불확실한 환경에서 조정 역할을 할 수 있다. 예를 들어 상하이항에 설치된 안벽크레인은 안전을 고려한 일부 선박 연계 작업을 제외하고, 작업 대부분에서 컨테이너를 자동으로 취급할 수 있다. 작업자가 선박 연계 작업에서 크레인 호이스트를 권상하면 나머지 절차는 컴퓨터가 담당할 수 있다. 세 번째 단계는 모든 작업이 컴퓨터에 의해 완전히 통제되는 것이다. 바다 쪽의 안전 문제로 인해 안벽크레인은 부분적인 자동화를 선호하지만, 야드크레인 기술은 완전 자동화 수준에 도달하였다. 자동화 크레인의 주요 공급업체는 ZPMC, Kalmar, ABB 등이고, 싱가포르항, 상하이항, 로테르담항, 부산항 등의 전 세계 주요 컨테이너 터미널에 설치되었다.
최근에 많이 적용되고 있는 기술로 더블 트롤리 안벽크레인(double-trolley quay crane, DTQC)이 있다. 크레인에는 바다와 육지 쪽에 각각 독립적으로 설치된 2개의 트롤리와 이를 중계하는 플랫폼이 있다. 트롤리의 분리는 안벽크레인의 취급 효율성을 향상하는 데 크게 이바지한다. 예를 들어 칭다오항에 설치된 더블 트롤리 안벽 크레인의 평균 처리량은 시간당 36.2박스로, 톈진항에 설치된 싱글 트롤리 안벽 크레인의 평균 처리량 31박스에 비해 16.8% 높다. 더블 트롤리 안벽크레인은 중국 외에도 함부르크항에 설치되어 있으며, 특히 최근 개장한 싱가포르항 Tuas Finger 2 터미널에 설치되었다.
더욱 혁신적인 기술로 Konecranes는 멀티 트롤리 안벽크레인(multi-trolley ship-to-shore crane, MTSC)을 제안하였다. 아직은 개념적인 장비이므로 설치된 항만은 존재하지 않는다. 크레인은 해안의 양측을 연결하고 4개의 트롤리가 설치된다. 크레인은 동시에 4대의 이송 차량을 서비스할 수 있다.
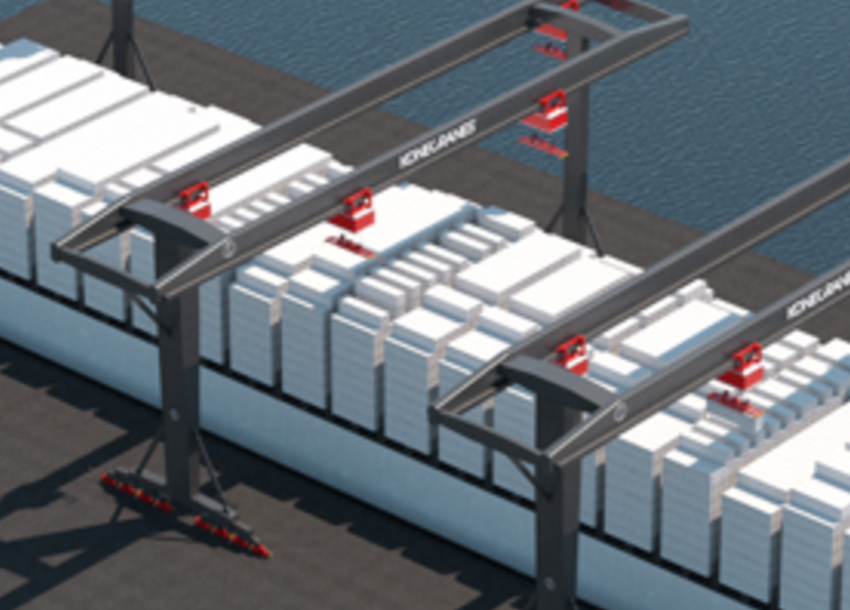
그림1. Konecranes의 멀티 트롤리 안벽크레인
https://www.konecranes.com/discover/next-generation-sts-cranes-provide-model-for-the-future
터미널 이송 차량
터미널 이송 차량은 터미널의 안벽과 야드 사이에서 컨테이너를 운반하는 장비이다. 수동으로 운전하는 YT(yard truck)가 현재 가장 일반적으로 사용되는 유형이고, 다른 유형으로 SC(straddle carrier)가 있다. SC는 YT와 달리 컨테이너를 직접 집거나 놓을 수 있다. 최근에는 숙련된 운전사의 부족 현상이 증가함에 따라 이송 차량의 무인화가 활발하게 진행되고 있다. 무인 이송 차량의 유형에는 AGV(automated guided vehicle), IGV(intelligent guided vehicle), Auto-SC, AT(autonomous truck) 등이 있다. 이들은 기계적 설계, 내비게이션 및 제어, 인프라, 운영 측면에서 차이점이 있다.

그림2. 터미널 이송 차량 유형
Zhou et al. (2022), p.5.
기계적 설계 측면
YT와 AT는 트랙터와 트레일러로 구성되고 트랙터만 동력을 갖는다. 대부분의 YT는 후진과 같은 복잡한 조종이 필요하므로 숙련된 작업자에 의해 운전된다. AT는 기존 트랙터를 개조하거나, 자율적인 의사결정 기능을 갖춘 새로운 트랙터로 설계될 수 있다. AGV와 IGV는 전륜구동 능력을 갖춘 트레일러로만 구성된 차량으로 전진, 후진뿐 아니라 게처럼 옆으로 움직이는 크래브(crab) 이동을 쉽게 수행할 수 있다. YT, AGV, IGV는 컨테이너를 차량의 위에 놓고 운반하지만, SC는 다리 사이로 컨테이너를 들고 운반한다. SC가 컨테이너 스택 사이를 주행하기 위해서는 최대 3단 높이까지 컨테이너를 들어 올릴 수 있어야 한다.
IGV는 외형적으로 AGV와 유사하지만, 내비게이션과 측위 기술 측면에서 차이점이 있다. AGV는 위성 및 관성 내비게이션 시스템을 사용하지만, IGV는 다중 센서 융합 측위 기술을 사용한다. 다중 센서 융합 측위 기술에는 위성 내비게이션 및 측위, LIDAR(light detection and ranging) SLAM(simultaneous localization and mapping), visual SLAM 등이 포함된다.
말단 하역(end-loading) 방식의 야드에서 AGV와 IGV는 블록 끝에서 야드크레인을 대기해야 하고, 야드크레인이 컨테이너를 상차 및 하차해주어야만 이동을 할 수 있다. 이러한 프로세스를 분리하기 위하여 차량의 컨테이너를 밀어 올리는 2개의 리프팅 플랫폼이 있는 L-AGV(lifting AGV)가 개발되었다. 또한 L-AGV와의 연계 작업을 위해 야드 블록 끝에서 컨테이너를 받을 수 있는 랙(rack) 기반 플랫폼도 함께 개발되었다.

그림3. L-AGV(lifting AGV)
Zhou et al. (2022), p.5.
내비게이션 및 제어 측면
YT와 SC에서는 운전자가 터미널 내의 신호등과 속도 제한에 따라 주행에 관한 의사결정을 직접 수행한다. 터미널 운영시스템(TOS)에서 전송된 지시(order)는 운전자가 직접 보고 실행할 수 있도록 차량 내의 디스플레이 장치에 표시되거나 음성을 통해 전달된다. AGV, IGV, Auto-SC, AT는 원격 사무실에서 시스템을 감시하는 운영자와 TOS에 의해 통제된다. 작업 지시는 2단계로 이루어지는데, 먼저 장비 통제 수준의 작업 지시(출발지→목적지)가 FMS(fleet management system)로 전달된다. 그 후 FMS는 교착 상태와 충돌을 방지할 수 있는 경로를 계산하여 개별 차량에 세부적인 작업 지시를 전달한다.
AGV와 IGV에서는 노드와 아크로 구성된 가상 그물망(mesh)이 필요하고, 경로가 일련의 노드와 아크로 구성된다. 이송 지시가 전달되면 차량은 그 지시를 정확하게 수행한다.
AT는 적용된 자율주행 기술의 수준에 따라서 작업 지시가 AGV, IGV와 같이 정밀할 수도 있고, YT처럼 개략적일 수도 있다.
인프라 측면
YT와 AT는 도로망이 포장과 같은 표준을 충족하는 한 특별한 인프라가 필요하지 않다. AGV와 IGV는 움직임에 대한 유연성이 높아서 회전 공간이 덜 필요하므로 도로망에 대한 공간 소요가 줄어들 수 있다. 반면에 SC와 Auto-SC는 AGV, IGV와 반대로 회전 공간이 더 필요하므로 공간 소요가 늘어날 수 있다. SC가 야드 블록 내의 컨테이너를 처리해야 할 때는 컨테이너 스택 사이 열의 간격 또한 확보해야 하므로 더 많은 공간이 필요하게 된다.
AGV를 사용하려면 노면 아래에 자성을 가진 트랜스폰더(transponder)를 매설해야 한다. 트랜스폰더는 위치 보정에 사용되며, AGV는 트랜스폰더를 지나면서 정확한 좌표를 판독하게 된다.
중앙 서버와 개별 차량 간의 신속한 통신을 지원하기 위해서는 고속 및 저지연 무선 네트워크가 필요하다.
운영 측면
YT, AGV와 같이 직접 상·하차가 불가능한 차량의 경우에는 크레인과의 컨테이너 전달을 위해 연계 지점에서 임시 주차 후 대기해야 한다. 컨테이너의 상차 혹은 하차가 완료되면, 차량은 지시에 따라 다음 위치로 이동할 수 있다. SC는 컨테이너를 지면 혹은 컨테이너 스택에 일시적으로 놓고 다음 작업을 위해 출발할 수 있는 특징을 가지고 있다. 이를 통해 SC와 크레인 간의 작업이 분리될 수 있다.
YT와 AT는 후진과 같은 움직임이 어려우므로 대부분 야드 블록의 측면에서 컨테이너 연계 작업이 이루어진다. AGV와 IGV는 YT, AT와 같은 측면 하역(side-loading)과 말단 하역이 모두 가능하지만, SC는 야드크레인 아래로 이동할 수 없으므로 말단 하역만 가능하다.
L-AGV와 함께 사용하는 랙 기반 구조물에는 2가지 방식이 있다. 첫 번째는 자동화된 방식으로 랙 기반 구조물이 표준화된 AGV 위의 컨테이너를 직접 밀어 올릴 수 있다. 두 번째는 고정된 방식으로 L-AGV가 랙 기반 구조물에 들어가기 전에 컨테이너를 밀어 올린 후 컨테이너를 랙 기반 구조물에 놓고 나와야 한다. 자동화된 방식은 샤먼항에, 고정된 방식은 칭다오항, 상하이항, 로테르담항에서 운영 중이다.
시사점
컨테이너 터미널의 주요 하역 장비인 안벽크레인, 야드크레인, 터미널 이송 차량의 가장 주요한 이슈는 자동화이다. 세 가지 유형의 장비 모두 원활한 운영을 위해서는 매우 숙련된 작업자가 필수적이지만, 인력 부족 현상은 점점 가속화될 것으로 전망된다. 기술 성숙도 측면에서 보면 안벽크레인은 도입 단계, 야드크레인은 성숙 단계, 터미널 이송 차량은 확산 단계로 평가될 수 있다. 최근에는 자율주행차 기술의 발전으로 인해 터미널 이송 차량의 자율화에 대한 시장 수요가 증가할 것으로 예상한다. Westwell, TuSimple 등의 기업과 중국 항만을 중심으로 개발과 테스트가 활발하게 진행 중이다.
국내의 경우, 야드크레인의 자동화는 보편화되었지만, 안벽크레인과 터미널 이송 차량은 매우 뒤처진 상황이다. 원격 통제가 가능한 안벽크레인이 2022년 최근에 처음 도입되었고, AGV는 2023년에 도입 예정이다. 국내 컨테이너 터미널의 첨단 기술 도입과 관련 기술 공급업체 간의 적극적인 협력이 필요한 시점이다.
본 사이트(LoTIS. www.lotis.or.kr)의 콘텐츠는 무단 복제, 전송, 배포 기타 저작권법에 위반되는 방법으로 사용할 경우 저작권법 제 136조에 따라 5년 이하의 징역 또는 5천만원 이하의 벌금에 처해질 수 있습니다.
| 집필진 | ||