모바일 알로하의 현 수준과 응용 전망
작성자 : 백승렬 울산과학기술원 인공지능대학원 교수 2025.06.30 게시서론
Mobile ALOHA [1]는 사람의 시연을 기반으로 고차원의 작업을 자율적으로 수행할 수 있도록 고안된 Stanford 대학의 로봇 프레임워크를 말한다. 2024년 초 공개되었으며, 양팔을 가진 로봇을 활용하여 새우 요리하기 (Cook Shrimp), 서랍 열기 (Use Cabinet), 의자 넣기 (Push chair) 등 복합적인 작업에 대한 사람의 시연 데이터를 수집하고, 모방 학습(imitation learning) 기법으로 성공적으로 로봇이 이를 재현하도록 학습한다. 학습된 정책의 재현 성공률은 여러 작업에서 80% 이상을 기록하고 있으며, 주로 부엌 등의 환경에서 시연이 되었지만 실제 산업 환경에서도 빠르고 손쉽게 데이터를 구축할 수 있을 것이라 예상된다. 본 고에서는 본문을 통해 이 기술의 수준을 알아보고 나아가야 할 방향을 필자의 시각을 빌려 소개하고자 한다.
본론
Mobile ALOHA 구성체. 그림1과 같이 움직일 수 있는 모바일 베이스 위에, 두개의 Franka Emika Panda 로봇팔을 장착한 구성으로 되어 있다. 각 팔의 자유도는 7이고, 모바일 베이스 자유도는 3, 그리퍼 등 추가 자유도를 통해 총 22자유도(DOF)를 가지는 고차원 컨트롤이 가능한 로봇체이며 사람의 행동을 모방하는 데 적합한 형태이다.
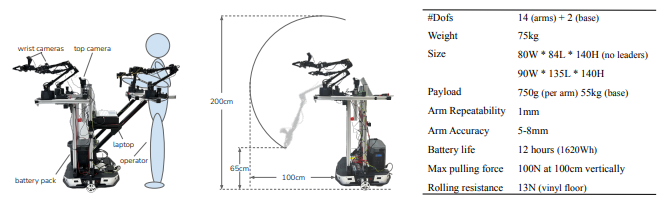
그림1. (왼쪽) 손목에 부착된 2개의 카메라와 사단 카메라 1개를 갖추고 있으며 전원 및 컴퓨터 장치가 탑재되어 있음. (중앙) 텔레오퍼레이션 장비가 있고, 이를 제거가능하며, 자율 실행시 두개의 로봇팔만 실행됨. 양팔은 최소 65cm에서 최대 200cm 높이까지 도달할 수 있으며 베이스로부터 1m까지 확장된다. (오른쪽) 좀 더 자세한 스펙을 나타낸다.
[1] 논문
특정 작업을 수행하는 로봇 하드웨어 플랫폼에서 수집된 데이터셋을 활용하여 로봇의 행동을 모방학습 하는 것이 로봇 학습에 많이 사용되는 방법이다. 하지만 이런 방식은 데이터 수집에 많은 시간이 소요된다는 단점이 있다. 또한 이런 방식으로 수집된 데이터셋은 시각적 다양성이 부족하여 방해 요소나 조명 변화와 같은 교란(perturbation)에 대해 강건하지 못하다. 기존에 존재하는 정적인 ALOHA 데이터셋 [2]은 총 825개의 시연을 수행하는 데이터셋을 모았으며, Ziploc 밀봉, 포크 집기, 사탕 포장, 키친 타올 찢기, 플라스틱 컵 뚜겅 열기, 탁구공 다루기, 커피머신 사용, 연필 전달, 배터리 끼우기, 드라이버 전달 등의 다양한 작업을 수행하는 로봇을 사람이 텔레오퍼레이션(tele-operation) 기능으로 로봇을 조정하여 수집하였다. 정적인 ALOHA 데이터셋은 모두 검은색 탁상 위에서 두 로봇 팔이 서로를 향해 고정된 상태로 수집된 것이고, mobile ALOHA 에서는 로봇 베이스가 움직이면서 배경이 변하고 두 팔이 전방을 향해 평행하게 배치되어 데이터를 수집하였다. 수집된 정적 ALOHA 및 mobile ALOHA 데이터를 같이 활용하여, 강화 학습 기법의 일종인 모방 학습으로 관련 손실함수를 활용하여 학습된다.
구체적인 시나리오. 실제 응용 사례에서 나타날 수 있는 다양한 능력, 물체, 상호작용을 포괄하는 7개 작업을 선정하여 테스트하였다. 7개 작업 중 일부를 그림2에 나타내었다. 그림 2에는 와인 닦기 (wipe wine)과 새우 요리하기 (cook shrimp) 시나리오를 나타내고 있다: "와인 닦기"에서 로봇 베이스는 1.5m x 1.5m 정사각형 범위 내에서 초기화되고, 최대 30도의 요(yaw) 회전이 허용된다. 로봇은 먼저 싱크대로 이동하여 수도꼭지에 걸려 있는 수건을 잡고, 이후 방향을 바꾸어 주방 아일랜드로 접근하고, 와인잔(30cm x 30cm 범위 내 무작위 위치)을 잡아야 한다. 이어서 쏟아진 와인을 닦은 뒤 , 와인잔을 테이블 위에 내려놓는다. "새우 요리하기"에서 로봇 위치는 최대 5cm, 모든 물체는 최대 2cm까지 무작위로 설정된다. 오른쪽 그리퍼는 먼저 뜨거운 팬에 기름을 붓고, 그다음 생새우를 넣는다. 왼쪽 그리퍼가 팬을 기울여 들고 있는 동안, 오른쪽 그리퍼는 주걱을 집어 새우를 뒤집는다. 이후 로봇은 방향을 전환하여 새우를 빈 그릇에 붓고, 팬을 테이블 위에 내려놓는다.
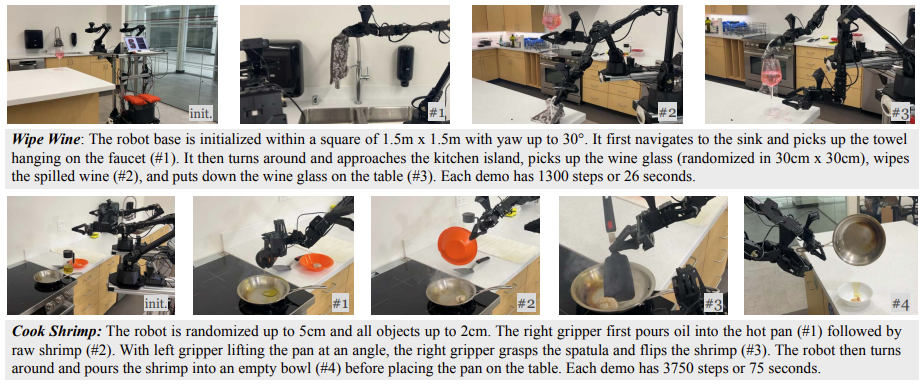
그림2. Mobile ALOHA의 구체적인 시나리오
[1] 논문
물류 산업에서의 응용 가능성. 물류 환경은 반복적이면서도 비정형적인 작업이 혼합된 환경으로 Mobile ALOHA의 장점을 적극 활용할 수 있다고 생각된다. 특히 다음과 같은 응용 가능성이 크다고 판단된다. - 창고 자동화: 박스 꺼내기, 분류, 적재 등에서 양팔 조작과 이동 능력을 활용해 유연한 자동화를 실현할 수 있을 것으로 기대된다. - 라스트마일 배송: 물류 배송의 마지막 단계에서 가정 현관 및 건물 내 복도 등 복잡한 실내 환경에서 물건을 집고 놓는 작업에 대한 수행이 가능할것으로 기대된다. - 컨테이너 적재/하역: 제한된 공간에서의 이중 팔 조작 능력이 유용하며, 정형 형태 혹은 비정형 형태의 짐을 쌓거나 짐을 내려놓는 작업을 수행할 수 있을 것으로 기대된다.
결론
본 고에서는 Mobile ALOHA의 현 수준과 다른 산업에 응용 가능성을 살펴보았다. Mobile ALOHA는 이동성과 양손 조작 능력을 결합한 혁신적 플랫폼으로, 물류 및 제조 산업에서 실질적인 변화를 이끌 수 있는 잠재력을 지닌다. 물류 분야에서는 이동형 로봇이 넓은 공간을 자유롭게 오가며 상자 분류, 제품 적재 및 정리 작업을 자동화할 수 있어 창고 운영의 효율성과 유연성을 크게 향상시킬 수 있다. 특히, 사람과의 협업이 요구되는 작업이나 비정형 환경에서도 높은 적응성을 보여줄 수 있다. 따라서 Mobile ALOHA는 단순 반복 작업을 넘어, 이동성과 조작의 통합을 통해 차세대 지능형 자동화 솔루션으로 자리매김할 것으로 기대된다.
본 사이트(LoTIS. www.lotis.or.kr)의 콘텐츠는 무단 복제, 전송, 배포 기타 저작권법에 위반되는 방법으로 사용할 경우 저작권법 제 136조에 따라 5년 이하의 징역 또는 5천만원 이하의 벌금에 처해질 수 있습니다.
| 핵심단어 | 모바일알로하로봇팔모방학습물류산업자동화 |
| 자료출처 | [1] https://mobile-aloha.github.io/resources/mobile-aloha.pdf [2] Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware, ArXiv:2304.13705 |
| 첨부파일 |
| 집필진 | ||